The Role of IMU in Patching the Limitations of GNSS in Level 3 Autonomous Driving

The automotive industry is entering a new era of mobility defined by electrification, advanced driver assistance systems (ADAS), and a gradual shift towards fully autonomous vehicles. As vehicles evolve from basic driver assistance to Level 3 (L3) conditional automation, the need for reliable, highly accurate positioning becomes more critical than ever. While GNSS, such as GPS, Galileo, GLONASS, and BeiDou, have long been the foundation of vehicle navigation, they are not sufficient on their own for the demands of autonomous driving.
The Limitations of GNSS
GNSS technology works well in open environments, but its performance declines significantly in complex real-world conditions. Urban driving environments present numerous challenges that can interrupt satellite signals. Tunnels, tall buildings, bridges, and dense tree cover can completely obstruct signals, causing navigation systems to lose position information within seconds.
Even when signals are available, GNSS accuracy is limited. Under ideal conditions, typical positioning accuracy is around 80 to 90cm (approximately 30 to 35 inches), which falls short of the precision required for lane-level autonomy. Signal reflections, such as those bouncing off large trucks or nearby buildings, can introduce errors of up to 1.5m (60 inches), potentially misleading the vehicle about its true location.
Another limitation lies in the update rate of GNSS receivers. Standard systems provide updates at around 2Hz, meaning position data is refreshed only twice per second. At motorway speeds, a vehicle can travel around 10m (30 feet) between updates, making it difficult for the system to respond accurately to dynamic driving situations such as bends or lane changes.
These constraints highlight a key reality: relying solely on GNSS cannot deliver the accuracy and reliability required for autonomous vehicles operating in complex traffic environments.
Dead Reckoning with IMUs
To overcome these limitations, autonomous systems increasingly rely on inertial measurement units (IMUs) as a complementary positioning technology (Figure 1). IMUs measure motion and rotation using accelerometers and gyroscopes, allowing vehicles to track their movement even when satellite signals are unavailable.
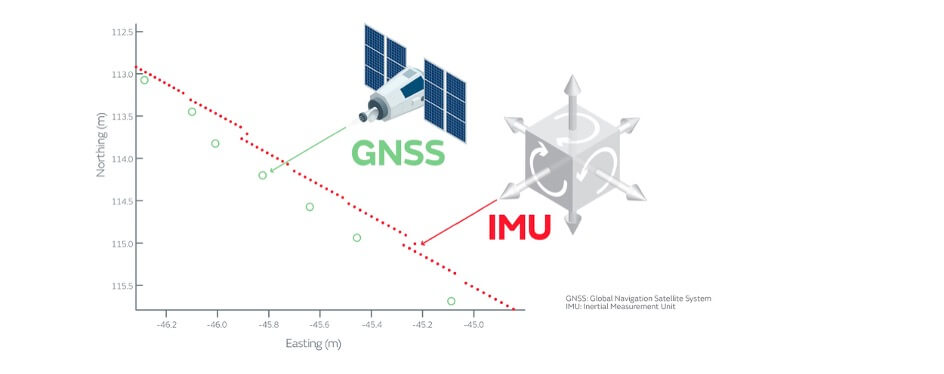
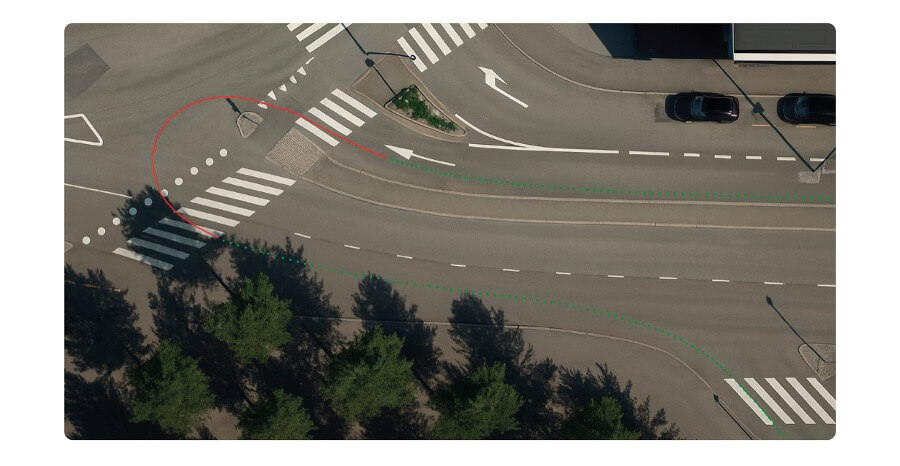
Unlike GNSS, inertial sensing remains operational regardless of environmental conditions. IMUs typically provide data at 100Hz or higher, enabling vehicles to capture rapid motion changes and accurately track their trajectories in real time. This capability is particularly important when navigating curves, performing lane changes, or executing manoeuvres such as U-turns (Figure 2).
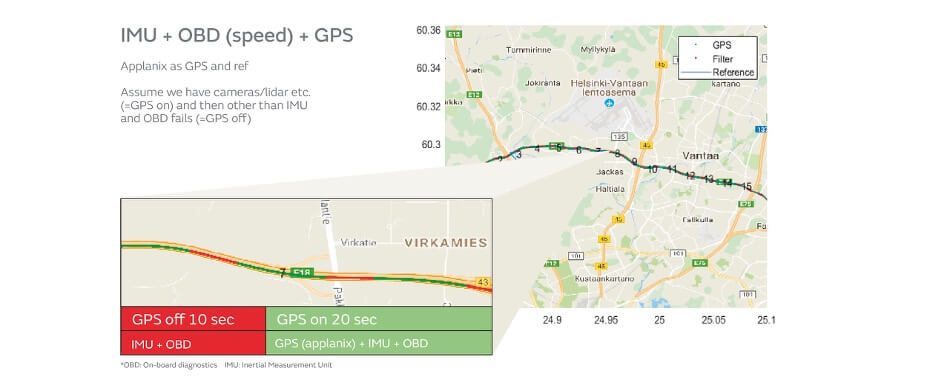
When GNSS signals are lost, the vehicle can rely on dead reckoning, where the IMU continuously estimates the vehicle’s position based on its motion. Testing has shown that IMUs can maintain lateral accuracy within 10cm (4 inches), and even down to 5cm (2 inches) when combined with other sensor data such as wheel speed and perception systems (Figure 3).
Supporting the Software-Defined Vehicle
IMUs are also becoming essential components in the emerging software-defined vehicle (SDV) architecture. Traditional vehicles relied on separate electronic control units (ECUs) for individual functions. In contrast, SDV architectures enable sensor data to be shared across multiple systems, allowing a single high-quality IMU, such as Murata’s SCH1633 automotive six degrees-of-freedom (6-DoF) IMU, to support functions such as ADAS, vehicle dynamics control, and suspension management (Figure 4).
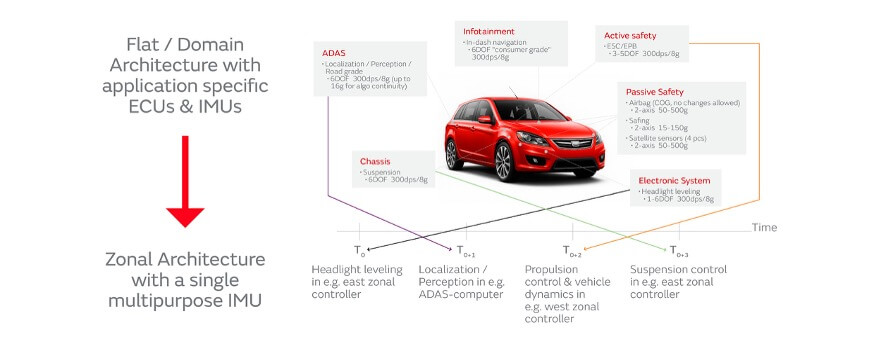
This shared architecture reduces hardware complexity while enabling new capabilities delivered through over-the-air (OTA) software updates, allowing vehicles to gain additional autonomous features after purchase.
The Road Ahead
As the industry moves toward L3 autonomy, vehicle positioning systems must deliver accuracy, reliability, and continuous availability under all conditions. GNSS alone cannot meet these requirements. By combining GNSS with high-performance inertial sensing, car OEMs can build robust navigation systems capable of supporting the next generation of autonomous vehicles.
In this evolving mobility landscape, IMUs are not just a backup technology; they are becoming a core component of safe and reliable autonomous driving.
